Különleges robotok a Nemzetközi Űrállomáson.
A Nemzetközi Űrállomás kezdeti elemeinek építésekor már több koncepció is készült olyan robotokról, amelyek a mikrogravitációs környezetben az asztronauták segítségére lehet.A tervekből megszületett, és a ISS-re is eljutott robotokat két kategóriára lehet elkülöníteni, kisebb méretű repülő drónokra, és humanoid robotokra.

A drónokat elsősorban navigációs, mérési, monitorozási, és emberi kommunikációs feladatokra, a humanoid robotokat, az asztronautákkal való együtt dolgozásra, azok irányításával, veszélyesebb feladatok kiváltására tervezték.
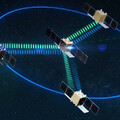
A kezdeti kísérletek - SPHERES
Szinkronizált pozíció, tartó, újra orientáló, kísérleti drónok. (Synchronized Position Hold, Engage, Reorient, Experimental Satellites) Először 2003-ban repültek a nemzetközi Űrállomás fedélzetén.
Az első szériában, dedikált hardverrel, és külön feladatokkal ellátva készültek. Méréseket, és navigációs kisérletekhez használták.

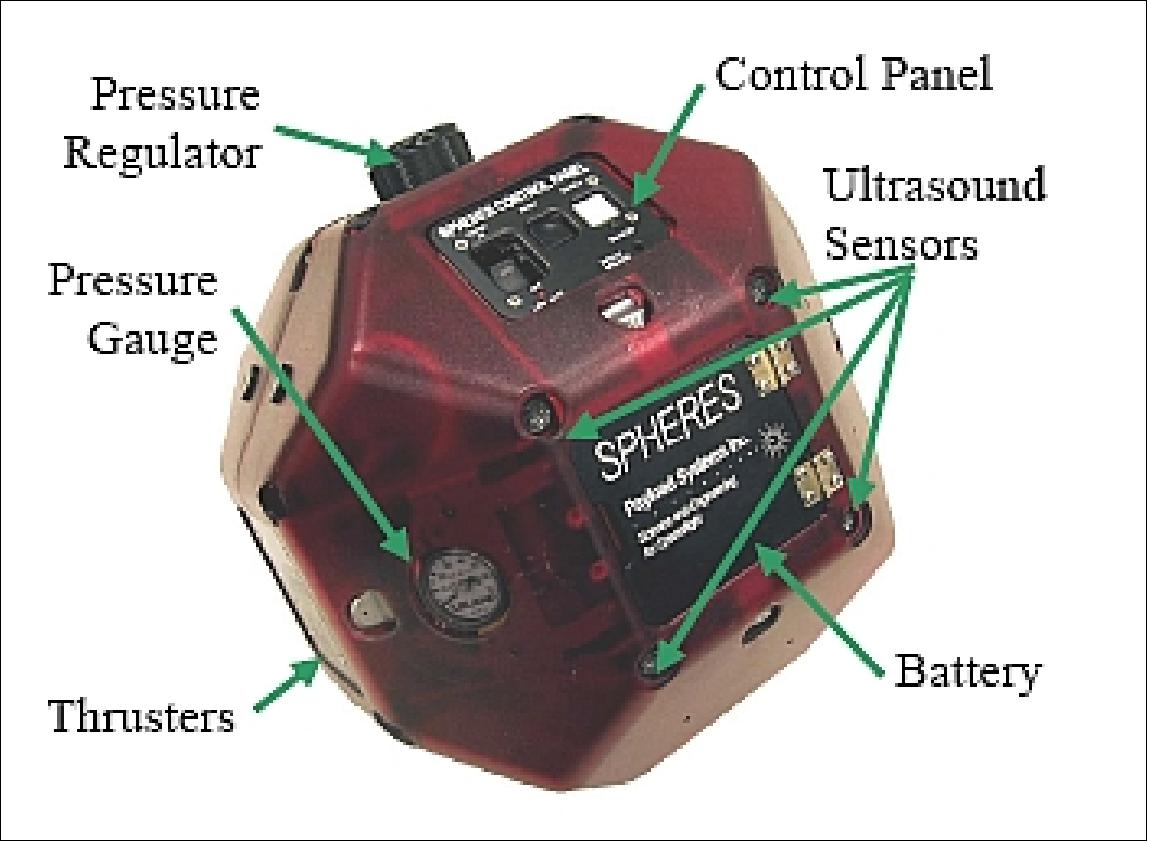
Mindegyik drón egy 18 oldalas Poliéder, és nagyjából egy röplabda méretű.
Mozgáshoz kis sűrített szén-dioxid fúvókát használtak. Késöbbi 'SmartSPHERES' változatban egy okostelefont is kapcsoltak a robothoz, ami annak mikrofonját és kameráját használva már kommunikációs képességgel és WiFi kapcsolattal is rendelkezett.
KIROBO - Az első beszélő robot
A Kirobo Japán első robot- asztronautája, a Tokiói Egyetem és Tomotaka Takahashi fejlesztette ki Koichi Wakata , a Nemzetközi Űrállomás első japán parancsnokának kíséretéhez.
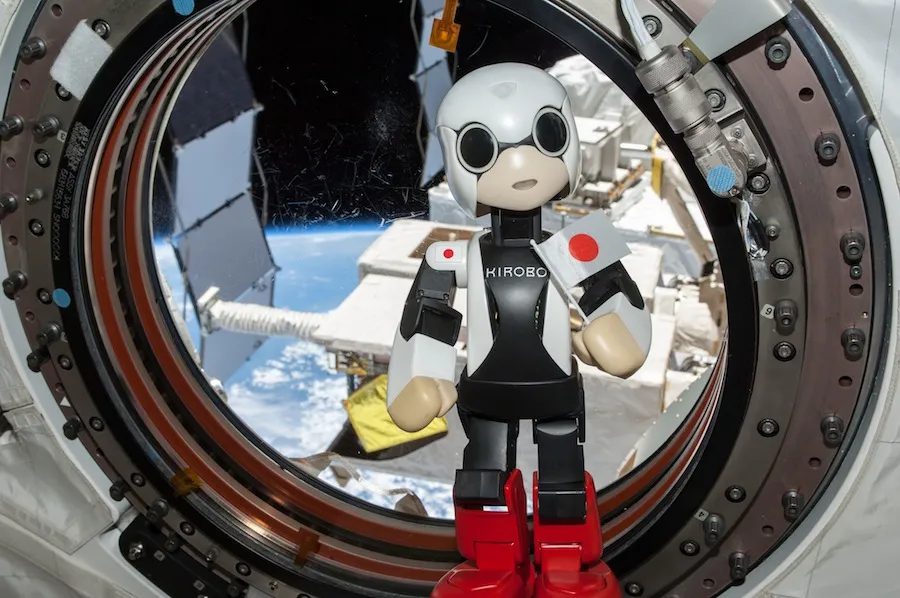
Kirobo az ISS-re 2013 augusztus 10-én a Japán utánpótlást szállító teherhajójával a HTV (Transfer Vehicle Kounotori 4) érkezett.
Kirobo 34 cm x 13 cm x 15 cm méretű, súlya körülbelül 1 kilogramm és japánul beszél.

A robot képességei közé tartozik a beszédfelismerés, a kapott utasítások feldolgozása, a beszédszintézis és a kommunikáció, valamint az arcfelismerés és a videofelvétel.
ASTROBEE - űrméh robotok
A három kocka alakú robot, Honey, Queen és Bumble (Méz, Királynő, és Zümi) kifejezetten a mikrogravitációs környezetthez tervezett robotok, az asztronauták segítőtársai, de tőlük függetlenül is képesek feladatok ellátására.

A 30 cm-es hangvezérelt robotokat kamerákkal, lézeres képalkotó LIDAR-al, mikrofonnal, és jelzőlámpákkal, LED érintőképernyős kezelőpanellel, továbbá egy lézeres mutatóval (laser pointer) továbbá kapaszkodó, és dokkoló karral látták el, így önmaguktól a töltőállomásra repülhetnek, hogy feltöltsék az akkumulátoraikat.
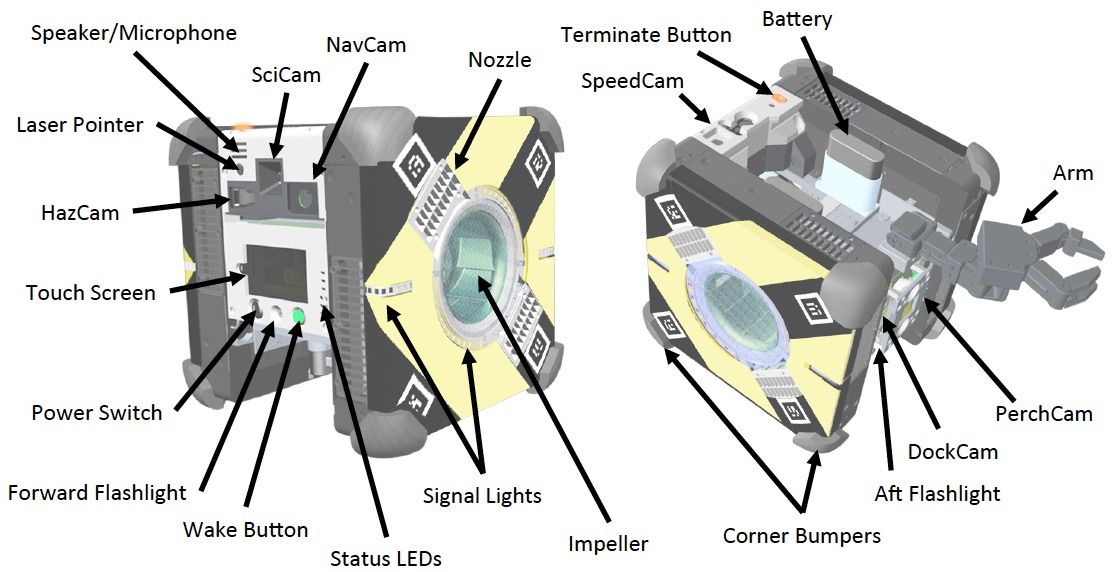
Fejlett rendszerüknek köszönhetően akadálymentesen közlekednek, az útjukba kerülő tárgyakat elkerülve, navigáláshoz propellereket használva.
Idővel az Asztrobeek figyelmeztethetik majd a személyzetet az állomás zaj-szintjének hirtelen változásaira, amelyek az állomás életfenntartó rendszereinek problémáját jelezhetik és érzékelőket is hordozhatnak a magas szén-dioxid-szint detektálására.
CIMON - (Crew Interactive Mobile companion) Emberi interaktív kommunikációs társ.
Elsődleges célja az űrhajósok stressz csökkentése. Partnernek és AI-asszisztensnek szánták a tervezői. A készüléket az Airbus és az IBM fejlesztette ki, a német űrkutatási központ támogatásával. A kis drón propellerek segítségével manőverezik az űrállomáson.
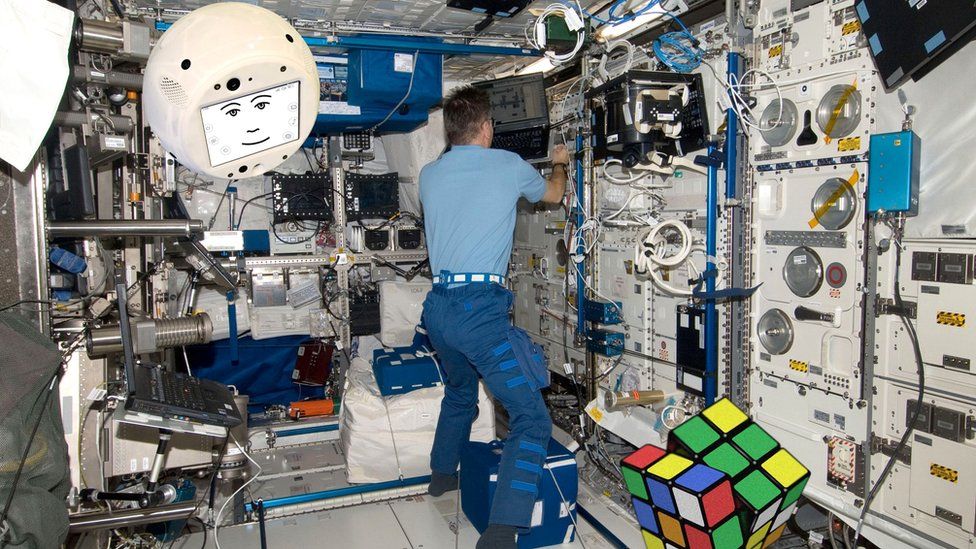
CIMON a fokozott stressz helyzetekben, mint a kísérleti munkák, karbantartási, javítási feladatoknál játszik szerepet, úgy viselkedik, mint egy kihangosító adatbázis, számítógép és kamera. Az űrhajósok hang utasítással teljes mértékben irányíthatják.
A robot 3D nyomtatással készült és 2óra üzemidővel bír egy feltöltéssel. Az első verzió először 2018-ban repült az ISS-en.
Internal Ball Camera (or Int-Ball) Belső Golyó Kamera
A tudomány olykor cuki formát is ölthet, ahogy azt a Japán golyó kamera is példázza.

Az Int-Ball célja, hogy az asztronauták távolról vezérelve képet és videót rögzítsenek vele. A robot önállóan mozogásra képes, és szerkezete 3D-s nyomtatással készült.
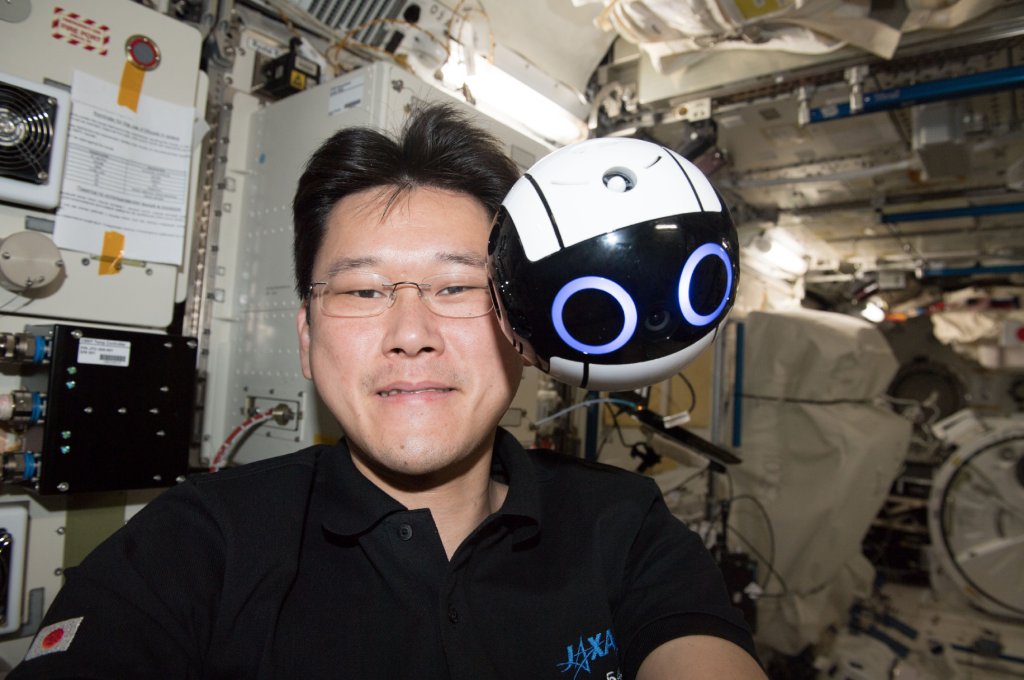
Segítségével valós időben követhető nyomon az ISS-en végzett tevékenységek a földi repülésirányítók és a kutatók számára. A cél, hogy a robot bárhol bármikor autonóm repüléssel és bármilyen szögben rögzíthesse, adminisztratív célból az űrhajósok munkáját, ezzel tehermentesítve őket. Jelenleg az ISS-személyzete, munkái során idejének körülbelül 10 százalékát teszi ki a képes-videós dokumentáció a JAXA szerint.
A Robonaut (Robotic Astronaut) - R2 emberszabású robot.
A NASA és a General Motors fejlesztett ki közösen Johnson Űrközpontban, Houstonban. Az R2 2011-ben a Discovery űrsiklóval repült az űrállomásra.

A mérnökök úgy tervezték a Robonautot, hogy humanoid legyen. Ez megkönnyíti a Robonaut számára, hogy ugyanazokat a munkákat végezze el, mint egy személy.
Képessé tették ugyanazon eszközök, szerszámok használatára, amivel az űrhajósok dolgoznak. Ezenkívül a robot törzse rögzíthető, így a Robonaut különböző platformon is mozoghat. A Robonautot kerekekkel is tesztelték. A második változatának már lába is volt az űrállomáson végzett munkához.

A Robonaut kétféleképpen működhet. A szoftver lehetővé teszi a Robonaut számára, hogy saját maga "gondolkodjon". Az emberek az R2-t, egyszerű feladatok elvégzésére adhatnak neki utasítást, de az R2 feladata kitalálni, hogyan hajtsa végre. Az R2 szoftvere frissíthető, hogy új feladatokat hajtson végre. Az R2 távirányítóval is működtethető. Ilyenkor az operátor a Robonaut szemszögéből nézheti, virtuális valóság felszerelések használatával.
Végül 2018-ban hozták vissza a Földre, miután sorozatos műszaki hibák léptek fel nála.
FEDOR Skybot F-850 - Orosz humanoid robot
2019. augusztus 22-én indult a Nemzetközi Űrállomásra az orosz FEDOR robotok legújabb verziója. A robot már a Szojuz parancsnoki székében ülve is folyamatosan figyelte, rögzítette az adatokat az út során.

Fedor 184 centiméter magas, felszereltségétől függően 106-160 kilogramm súlyú, és 20 kilogramm hasznos teher hordozására alkalmas. A robotot, a távlati tervek szerint űrállomások építésénél és hosszú távú űrrepüléshez akarták felhasználni, távirányítással az őt navigáló ember mozdulatait utánozta volna. Úgy tervezték, hogy képes legyen járni, emelni, kormányozni, kúszni-mászni és felborulás után önállóan talpra állni, valamint korlátozottan az önálló cselekvésre is.

Kiderült azonban, hogy technikája a világűrben nem működik, lábai alkalmatlanok a külső bevetésekhez – mondta el Dudorov. A fejlesztő közölte, hogy már dolgoznak Fedor utódjának tervein.
Forrás: Nasa, JPL, Roszkoszmosz, JAXA, ESA