
Ismerje meg a NASA talán legbizarrabb androidját..
A látszólag összebarkácsolt robotnak fontos szerep jutott az emberes űrrepüléshez szükséges technológia kifejlesztésében
 Az 1960-as években az amerikai űrkutatási és az emberes Holdra-szállási tervekhez sok különleges, mai szemmel nézve talán furcsa kutatási program is kapcsolódott, ezek egyike az űrhajósok élet-fenntartó ruhájának tesztelése volt.
Az 1960-as években az amerikai űrkutatási és az emberes Holdra-szállási tervekhez sok különleges, mai szemmel nézve talán furcsa kutatási program is kapcsolódott, ezek egyike az űrhajósok élet-fenntartó ruhájának tesztelése volt.
Az űrruha tervezése és építése során sok mindent figyelembe kellett venniük a mérnököknek, de elsősorban az űrhajós mozgási képességeit. A szkafandert építő mérnökök tudni akarták, hogy mekkora a ruha mozgási ellenállása, hogy mekkora erőre lesz szüksége az űrhajósoknak a nyomás alatt álló több rétegű szövet, és a fém csukló pontokkal szerelt ruha mozgatásához. A kezdeti szkafanderekben a mozgás nehézkes és korlátozott volt, és fennállt a veszélye, hogy akár meg is sérülhet az azt használó asztronauta. A NASA ezért a kezdeti tesztelési fázisból ki akarta vonni az embert és helyette egy teszt robotra bíznta a kulcsfontosságú adat gyűjtést.
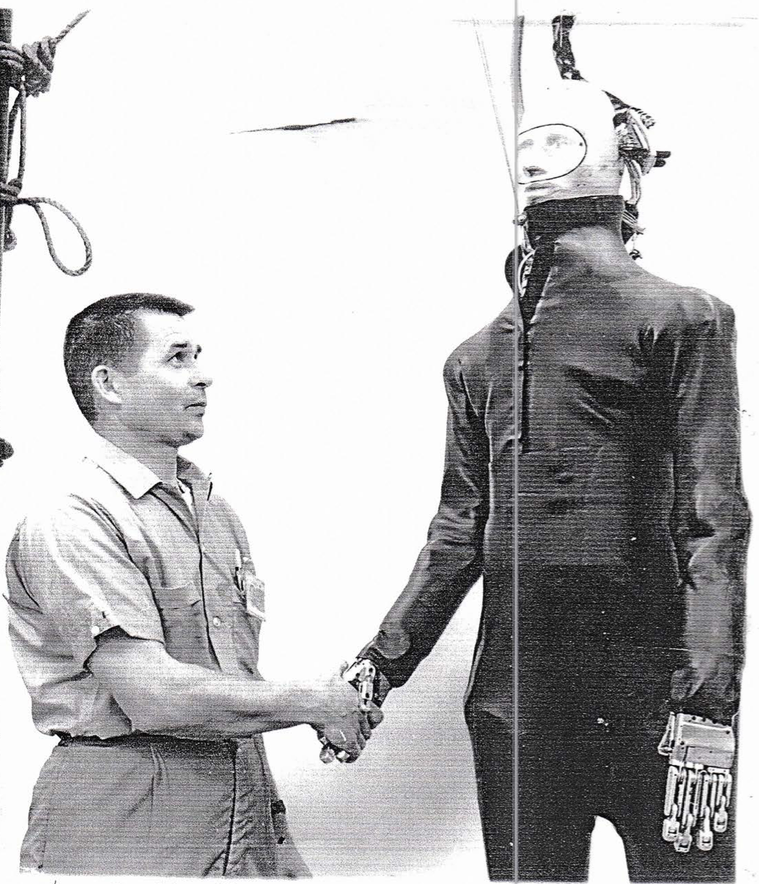 Egy mérnök kezet fog a tesztbábúval
Egy mérnök kezet fog a tesztbábúval
A NASA az Illinois-i Műszaki Intézetet bízta meg a K6051 szerződés keretében, hogy megalkossák az androidot. Az intézet 1963. május 22. és 1965. július 31. között létrehozta az űrruhák tesztelésére szolgáló, elektromos/hidraulikus összetett mozgásra képes teszt robotot.
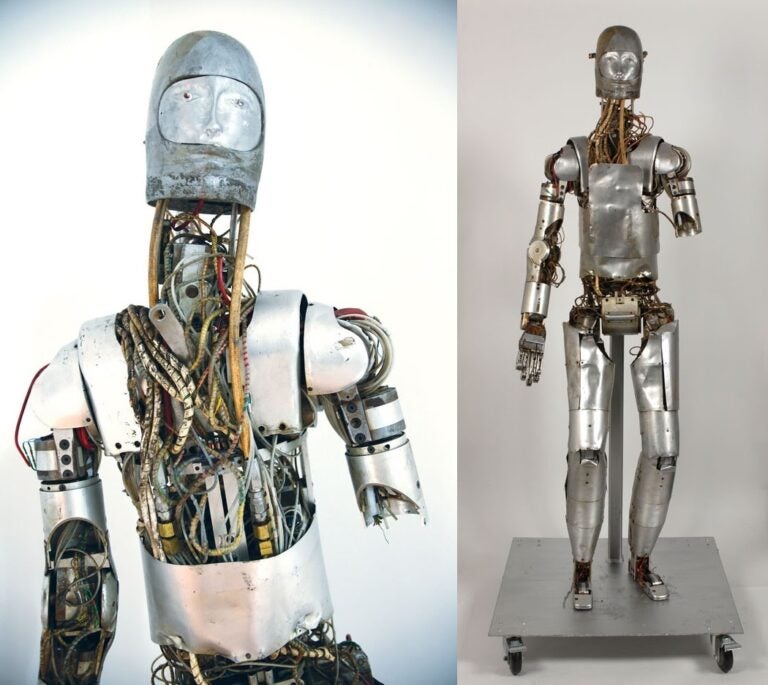
A 230 kilós android gyakorlatilag egy speciális ember alakú erőmérő volt, így meg tudta mérni a nyomatékot és az ellenállási erőket az űrruhában. Nem volt képes járni, és nem volt egyensúlyi rendszere. Egy állványhoz kapcsolódott, és egy hozzá tartozó konzol kezelője irányította. De ez nem jelenti, hogy csak egy egyszerű gép lett volna.
A tesztbábut kábelek, elektromos alkatrészek, hidraulika vezetékek és motoros csatlakozók látszólagos rendetlensége alkotta. A hardver képes volt az ízületeken keresztül a végtagok mozgásának irányítására, az egyes mozgásokhoz tartozó nyomaték erők érzékelésére és méréséért.
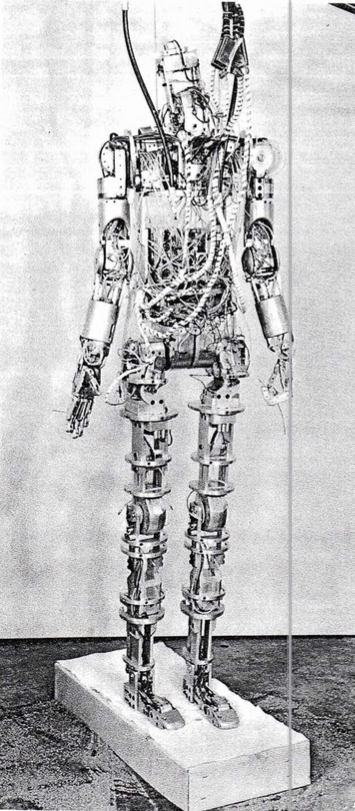 A "meztelen" tesztbábu, a burkolatai nélkül hátborzongató látványt nyújthatott. Forrás: IIT / NASA
A "meztelen" tesztbábu, a burkolatai nélkül hátborzongató látványt nyújthatott. Forrás: IIT / NASA
Az irányító rendszer kezelője utasítására a tesztbábut működtető hidraulika végezte annak mozgását. A mozgáshoz kifejtett hidraulika nyomást a szomszédos konzol, feszültségmérőin keresztül leolvasva mérték az erőt. Megfelelő teszt körülmények között meg tudták állapítani, hogy az űrhajósnak mekkora erőre lesz szüksége a mozgáshoz.
De ez egyáltalán nem volt egyszerű, hiszen az emberi mozgások és az emberi ízületek bonyolultak. Az első vizsgálatok arra jutottak, hogy a robot belsejében egyszerűen nem volt elegendő hely a bonyolult emberi ízületek kellő szimulálásához. Az 1960-as években alkalmazott "miniatűrizált technológia" még nem volt elég kicsi ahhoz, hogy minden beleférjen a tesztbábu belsejébe, ezért a mérnökök néhány kompromisszumot kötöttek, és a legpraktikusabb módon, a 35 leggyakoribb emberi mozgásra fokuszáltak.
Az androidot úgy tervezték, hogy egyetlen kapcsolati ponton keresztül egyidejűleg akár négy mozgást is végezhessen az összetettebb mozgások vizsgálatához. A négyes határt gyakorlatilag az operátor képességei szabták meg. A kezelő felelőssége volt, hogy úgy mozgassa az androidot, hogy az ízületek nehogy megtörjenek. Például a fej és a vállak elakadhattak, ha rossz időben rossz irányban mozognak, ezért az irányítás koncentrációt igényelt.
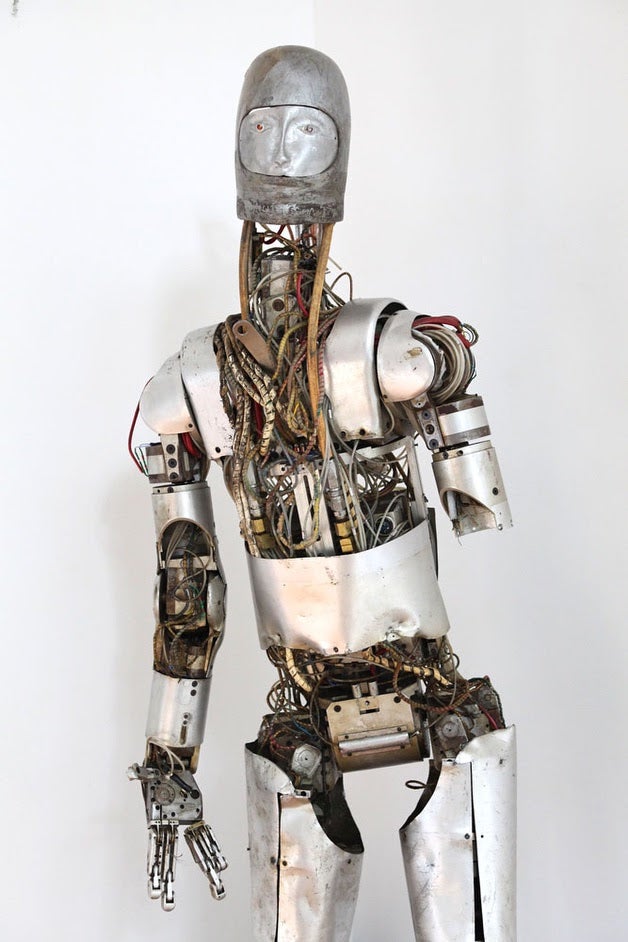 Ennek a fennmaradt példánynak bal karja csónkolva van. Forrás: RR Auction
Ennek a fennmaradt példánynak bal karja csónkolva van. Forrás: RR Auction
Már ekkor figyelmet fordítottak az űrhajósok különböző méreteire, és test-felépítésére ezért úgy tervezték a robotot, hogy állítható legyen a törzs, és a végtagok valamint a nyak is meghosszabbítható volt, így az alacsonyabb űrhajósok mint például Gus Grissom és Pete Conrad és a magasabbak mint John Glenn alkata is modellezhető volt.
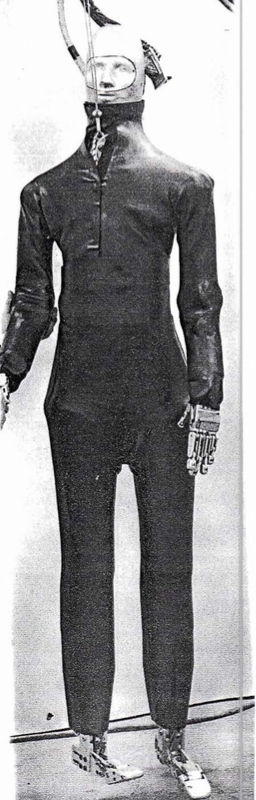 A tesztbábu külső burkolattal úgy nézett ki, mint egy buvárruhás férfi.
A tesztbábu külső burkolattal úgy nézett ki, mint egy buvárruhás férfi.
Az android mechanikáját alumínium lemezekkel burkolták, ami egy további rugalmas neoprén habréteget kapott volt. Az android feje üvegszálerősítésű polisztirolból készült, a szemrész pedig eltávolítható volt, így a mérnökök könnyen hozzáférhettek a fej üregében lévő mechanikához.
Mint kiderült a tesztek során, a hidraulikus rendszer nem tudta szivárgás nélkül felemelni a tesztbábu végtagjait. A kreatív megoldások, köztük a bábu "buvárruhába" helyezése, sem tudta megoldani a problémát, és végül a projekt fejlesztését abbahagyták.

Az elkészült androidok közül kettő is fennmaradt az utókor számára. Az egyik a Smithsonian Intézet Udvar-Hazy múzeumában van kiállítva, a másik pedig 2016-ban egy aukció keretében került kalapács alá.
Forrás: popularscience, Smithsonian múzeum



